
Calendrier des événements
Assistez à la thèse de M. BOUKHARI, sur le véhicule autonome !
Thèse
Bonjour à tous,
Nous avons le plaisir de vous inviter à la soutenance de thèse de Mohamed Ryad BOUKHARI qui aura lieu le mardi 05 février 2019 à 14h00h, amphi 311 à SQY.
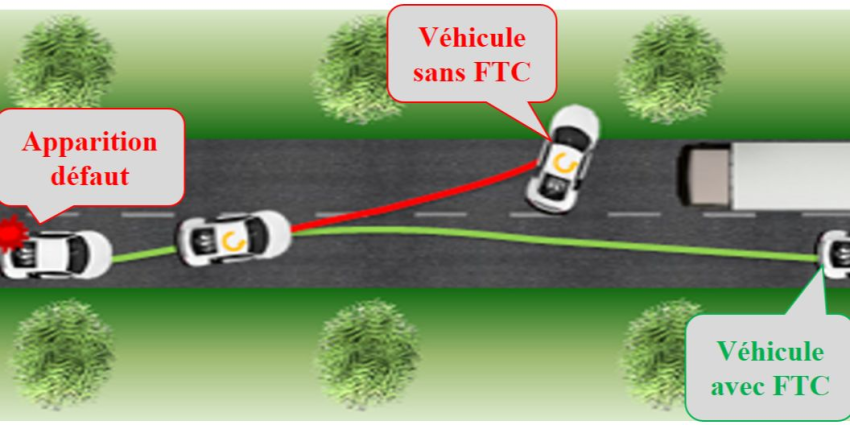
Les travaux de thèse de Ryad s’intitulent : Architectures de commande tolérante aux défauts capteurs proprioceptifs et extéroceptifs d’un véhicule autonome.
Cette thèse s’est déroulée dans le cadre d’une collaboration avec l’Institut VEDECOM.
Le jury de thèse :
Michel BASSET, Professeur, Université de Haute-Alsace, Rapporteur
Mohamed CHADLI, Maitre de Conférence HDR, Université Jules Verne Picardie, Rapporteur
Frédéric KRATZ, Professeur, INSA Centre Val de Loire, Examinateur
Fethi BENOUZEDOU, Professeur, Université Paris-Saclay, Examinateur
Dominique GRUYER, Directeur de Recherche, IFSTTAR, Examinateur
Moussa BOUKHNIFER, Enseignant Chercheur HDR, ESTACA, Directeur de thèse
Ahmed CHAIBET, Enseignant Chercheur, ESTACA, Encadrant
Sébastien GLASER, Chercheur HDR, VEDECOM, University of Queensland, Encadrant
Résumé de la thèse :
Le véhicule autonome offre plusieurs avantages : le confort, la réduction du stress, et la réduction de la mortalité routière. Néanmoins, les accidents mortels impliquant sa responsabilité, ont mis en exergue ses limitations et ses imperfections. Cet accident soulève des questions sur la fiabilité et des voix ont fait part d'une forte préoccupation pour la sécurité des usagers du véhicule autonome. En outre, les tâches de perception et de localisation des véhicules autonomes peuvent avoir des incohérences amenant à des erreurs qui nuiraient à la stabilité du véhicule. Les sources de ces incohérences peuvent être de natures différentes et agir à la fois sur le capteur lui-même (Hardware), ou bien sur le post-traitement de l’information (Software). Dans ce contexte, plusieurs difficultés doivent être surmontées pour arriver à sécuriser l'interaction des systèmes automatisés de conduite avec les conducteurs humains face à ces problèmes, l'adoption d'une stratégie de commande tolérante aux défauts est primordiale. Dans le cadre de cette thèse, des stratégies de détection et de tolérance aux fautes pour la perception et la localisation sont mise en œuvre. En outre, des stratégies de détection et d'estimation de défauts pour les capteurs proprioceptifs sont par ailleurs proposées. L'objectif est d'avoir une localisation fiable de défaut et assurer un fonctionnement avec des performances acceptables. Par ailleurs, vue l'imprédictibilité et la variété des scènes routières, une fusion tolérante aux fautes à base des algorithmes de vote est élaborée pour une meilleure perception. La fusion tire profit des technologies actuelles de détection d'obstacles (détection par radio, faisceaux lumineux ou par caméra) et l'algorithme de vote assure une sortie qui s'approche le plus de la réalité. Des tests avec des données réelles issues d'un véhicule démonstrateur sont utilisés pour valider les approches proposées dans cette thèse.
Voir tous les événements
Mardi 5 février 2019
14h00
- 16h00
(GMT +2)
Campus ESTACA Paris Saclay
12 avenue Paul Delouvrier
78180
Montigny le Bretonneux
-
Gratuit Gratuit sur inscription
Inscriptions closes
Campus ESTACA Paris Saclay
12 avenue Paul Delouvrier78180 Montigny le Bretonneux
Complément d'information (parking, Métro...)
Gare de Saint Quentin en Yvelines, Montigny le Bretonneux, Ligne N et U ou RER C
Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.